
Diseño de células robotizadas seguras: normas, layouts y casos de fallo – seium
Marco técnico y operativo para planificar, integrar y certificar células robotizadas seguras. Incluye mapeo de normas, plantillas de layout, análisis PL/SIL y protocolos de verificación. KPI: 0 incidentes incapacitantes, -60% tiempo de validación, +15% OEE sin sacrificar seguridad.
Introducción
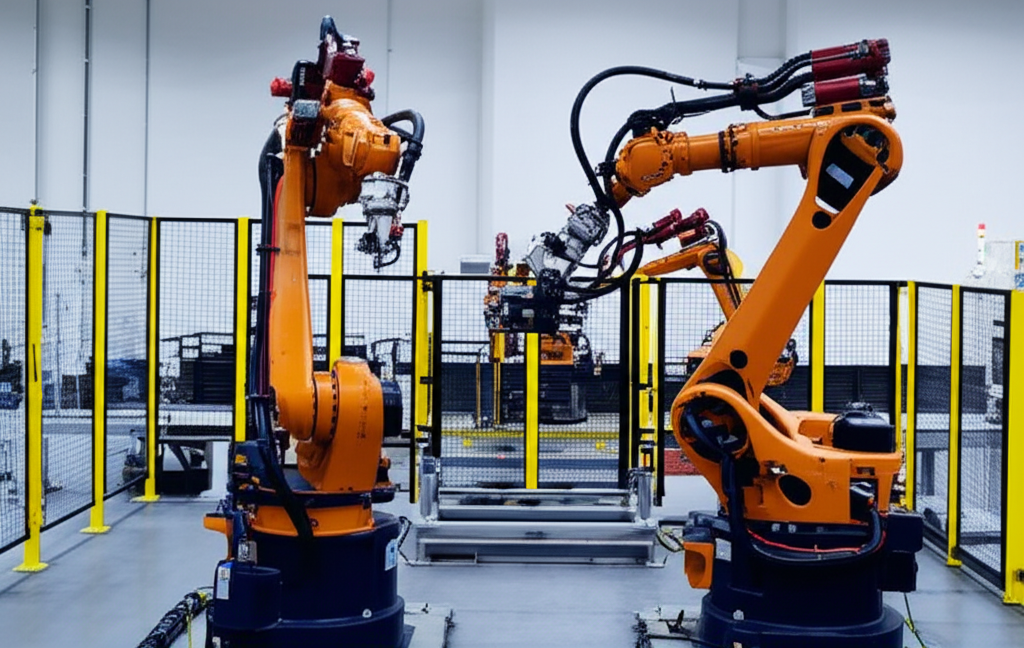
Las células robotizadas son el corazón de la automatización industrial moderna. La oportunidad de ganar productividad, trazabilidad y flexibilidad es enorme, pero solo se materializa si el diseño contempla la seguridad como requisito de ingeniería desde el inicio. Un enfoque basado en normas, riesgos cuantificados y layouts verificados reduce incidentes, evita paradas por auditorías y recorta el tiempo de puesta en marcha. Este documento articula, de principio a fin, cómo diseñar, validar y operar células robotizadas seguras con foco en resultados medibles.
El objetivo es ofrecer una ruta pragmática para alinear diseño mecánico, eléctrico, control, PLC de seguridad, sensórica y software con los requisitos de las normas (ISO 10218, ISO 12100, ISO 13849-1, IEC 62061, ISO/TS 15066, entre otras), integrando estimaciones PL/SIL, distancias de resguardo, funciones de parada segura y pruebas funcionales. Además se incluyen layouts tipo, casos de fallo frecuentes y KPI para dirigir la mejora continua.
Visión, valores y propuesta
Enfoque en resultados y medición
La misión es acelerar proyectos de automatización logrando células robotizadas seguras sin fricciones regulatorias ni pérdidas de rendimiento. El método se basa en ingeniería de riesgos y verificación continua: cada decisión de diseño se enlaza a una exigencia normativa, a un plan de prueba y a un indicador de negocio (disponibilidad, calidad, coste). Los KPI core incluyen: tasa de incidentes (0 LTI), cumplimiento normativo ≥ 98% en auditoría, tiempo de validación reducido en ≥ 60%, OEE ≥ 85%, MTTR de equipos de seguridad ≤ 20 min, tiempo de paro por falsas alarmas de seguridad ≤ 1% del calendario productivo, y NPS interno ≥ 60 tras el arranque.
- Seguridad como requisito de negocio: el diseño seguro evita retrabajos, sanciones y paradas no planificadas.
- Riesgos cuantificados: evaluación conforme a ISO 12100 y trazabilidad a objetivos PL/SIL en ISO 13849-1/IEC 62061.
- Verificación por diseño: cada layout se valida con cálculos de distancias, funciones de seguridad y pruebas funcionales.
Servicios, perfiles y rendimiento
Portafolio y perfiles profesionales
El portafolio cubre análisis de riesgos, diseño de layouts, selección de salvaguardas, cálculos de Performance Level (PL) y Safety Integrity Level (SIL), programación de PLCs de seguridad, validación funcional, documentación de conformidad y formación. Los perfiles clave incluyen: ingeniero/a de seguridad de máquinas (normativa y PL/SIL), integrador/a de robots (comisionado y programación), diseñador/a mecánico con experiencia en resguardos, especialista eléctrico (SISTEMA/SiLcet), programador/a de PLC/PLC-S (safety), metrólogo/a (medición de velocidad y distancia), y auditor/a técnico/a (gap assessments y pre-auditorías).
El rendimiento del proyecto se gestiona con milestones visibles, matrices de trazabilidad y listas de verificación. La selección de sensores (escáneres láser, cortinas de luz, cerraduras, enclavamientos con bloqueo, pulsadores de parada de emergencia, alfombras de seguridad) se sustenta en el análisis de tareas (mantenimiento, ajuste, set-up) y de exposición, frecuencia y posibilidad de eludir, siguiendo ISO 12100 y niveles de riesgo residual. El equilibrio entre productividad y seguridad se logra con modalidades como SSM (monitoreo de velocidad y separación), SLS (velocidad limitada segura), STO/SS1/SS2 (paradas seguras), y gestión de modos T1/T2 para enseñanza y prueba.
Proceso operativo
- Análisis de uso previsto y límites del sistema: alcance del robot, herramienta, piezas, interfaces y modos de operación.
- Identificación de peligros: mecánicos, eléctricos, térmicos, de proyección, atrapamientos, fallos de energía y software.
- Estimación y evaluación de riesgos: gravedad, frecuencia/exposición, posibilidad de evitar; priorización de riesgo.
- Medidas de reducción: resguardos, distancias, funciones de seguridad, modos, señalización, procedimientos y formación.
- Diseño y cálculo: layouts, distancias de seguridad (ISO 13855), PL/SIL requerido y alcanzado, selección de componentes.
- Verificación y validación: pruebas funcionales, fallo único, diagnósticos, tiempos de parada, cobertura e informe.
- Documentación y marcado: manuales, esquema eléctrico, lista de verificación, expediente técnico y declaración de conformidad.
Cuadros y ejemplos
| Objetivo | Indicadores | Acciones | Resultado esperado |
|---|---|---|---|
| Captación | Leads/h | Webinar técnico + checklist PL/SIL descargable | Leads cualificados +30% con intención de proyecto |
| Ventas | Tasa de cierre | Propuesta con matriz de riesgos y layouts comparativos | Cierre +18% por eliminación de incertidumbre de compliance |
| Satisfacción | NPS | Arranque con plan de pruebas y formación en sitio | NPS ≥ 60 con transferencia de conocimiento y cero incidentes |
Representación, campañas y/o producción
Desarrollo profesional y gestión
En un proyecto de célula robotizada segura, la “producción” equivale a integrar activamente a todas las especialidades desde el kick-off: operaciones, mantenimiento, seguridad, calidad y TI. Se define una matriz RACI, roles de firma y ventanas de revisión técnica para cambios de alcance y equivalencias de componentes. Las campañas de seguridad se enfocan en los modos de trabajo (automático, manual, enseñanza T1/T2), en el desbloqueo controlado de resguardos y en la verificación periódica de funciones como STO, SS1, SLS, SSM y EDM.
La negociación con proveedores se rige por especificaciones técnicas y criterios mínimos de seguridad (p. ej., PLe, Cat. 3 o 4; SIL 2/3 según riesgo), garantías de tiempo de reacción, MTTFd del canal, DCavg y CCF. Se exige evidencia documental (certificados, reportes de pruebas, bibliotecas SISTEMA, curvas de alcance de escáneres, tiempos de conmutación de variadores) y compatibilidad con el ecosistema de la planta.
- Checklist de aprobación de componentes de seguridad: cerraduras, cortinas, escáneres, PLC-S, relés, variadores con funciones de seguridad.
- Plan de pruebas FAT/SAT: criterios de aceptación, instrumentos de medición, casos de fallo, registro en video, firmas.
- Gestión de cambios (MOC): trazabilidad de riesgos y revalidación tras cualquier modificación sustantiva del layout o software.
Contenido y/o medios que convierten
Mensajes, formatos y conversiones
Los proyectos de seguridad se ganan con evidencia técnica clara. Piezas como casos de estudio con KPI, layouts comparativos (valla vs. escáner vs. cobot), videos de pruebas SS1 y SSM, y matrices PL/SIL alcanzado son decisivas. Los mensajes clave: cumplimiento sin sacrificar productividad, reducción de tiempos de parada, inspecciones superadas a la primera y transferencia de conocimiento. Formatos recomendados: fichas técnicas resumidas, infografías de alcance/cobertura, simulaciones de alcance del robot y listas de verificación descargables.
Para maximizar conversiones: usar hooks centrados en riesgos típicos (cruce inadvertido, bloqueo de guardas, arranque inesperado), prueba social con auditorías superadas, CTAs a diagnósticos in situ y variantes A/B (layout con resguardo fijo vs. escáner, ROI de cada opción). KPIs: ratio de descarga de checklists, tasa de solicitud de auditorías, tiempo medio a propuesta y ratio de aceptación de propuesta técnica.
Workflow de producción
- Brief creativo: problema, entorno, normas aplicables, restricción de espacio y ROI.
- Guion modular: riesgos, opciones de layout, comparativa PL/SIL, evidencia en planta.
- Grabación/ejecución: pruebas reales, medición de distancias y tiempos de parada.
- Edición/optimización: gráficos de alcance, datos en overlay, criterios de aceptación.
- QA y versiones: revisión técnica, validación legal, versión para mantenimiento/formación.
Formación y empleabilidad
Catálogo orientado a la demanda
- Riesgos y normas para células robotizadas (ISO 12100, ISO 10218, ISO/TS 15066, ISO 13849-1, IEC 62061, ISO 13855).
- PL/SIL aplicado con herramientas (SISTEMA/SiLcet): del requisito al cálculo y validación.
- Diseño de layouts y salvaguardas: vallados, cortinas, escáneres, enclavamientos y distancias.
- Comisionado y pruebas de seguridad: tiempos de parada, SS1/SS2, SLS, SSM, EDM, MTTFd y DCavg.
Metodología
Programas por competencias con módulos teórico-prácticos, prácticas con celdas demo, evaluaciones por proyecto, feedback individual y simulaciones de auditoría. Incluye plantillas para evaluación de riesgos, hojas de cálculo de distancias, informes de validación y cuadernos de pruebas. Se contempla una bolsa de trabajo para integradores, ingenieros de seguridad y técnicos de mantenimiento especializados en seguridad funcional.
Modalidades
- Presencial/online/híbrida orientada a equipos multidisciplinares.
- Grupos y tutorías con resolución de casos reales de planta.
- Calendarios trimestrales con incorporación flexible y rutas para certificación interna.
Procesos operativos y estándares de calidad
De la solicitud a la ejecución
- Diagnóstico: visita de planta, levantamiento de tareas, modos, flujos y limitaciones físicas.
- Propuesta: matriz de riesgos y opciones de reducción, layouts y comparativa de ROI.
- Preproducción: ingeniería de detalle, selección de componentes y planes de prueba.
- Ejecución: montaje, cableado, programación safety y comisionado con pruebas FAT/SAT.
- Cierre y mejora continua: expediente técnico firmado, lecciones aprendidas y plan de auditorías.
Control de calidad
- Checklists por servicio: análisis de riesgos, distancias, PL/SIL, pruebas de funciones y documentación.
- Roles y escalado: responsable técnico, QA de seguridad y auditoría interna con criterios claros.
- Indicadores (conversión, NPS, alcance): avance a hitos, hallazgos, productividad y disponibilidad.
Casos y escenarios de aplicación
Soldadura robotizada MIG con valla y enclavamientos
Situación: célula de soldadura MIG con robot de 6 ejes, posicionador y antorcha con riesgo de proyección, radiación y atrapamiento. Diseño: valla perimetral, puertas con enclavamiento con bloqueo, cortinas de luz para carga semiautomática y extracción de humos. Funciones de seguridad: STO, SS1, SLS, EDM y paro de emergencia tipo botón cóncavo con cubierta protectora. Resultados: incidentes graves 0, cumplimiento en auditoría 100%, tiempo de validación -55%, OEE +12% al reducir falsas paradas por mejores distancias y tiempos de reacción calibrados.
Paletizado con cobot y SSM
Situación: cobot de paletizado con interacción frecuente con operarios. Riesgos: impacto y empuje, carga caída, atrapamientos en pallet y flejado. Diseño: modo colaborativo con límites de fuerza y potencia (según guías técnicas), SSM con escáner 2D/3D, control de velocidad en aproximación y paro seguro al contacto por envolvente. Resultados: throughput +8% respecto a vallas fijas tradicionales, tasa de casi-accidentes -70% gracias a ajustes finos de distancia y monitorización dinámica, aceptación de auditoría sin observaciones.
Desbaste con robot y resguardo mixto
Situación: robot con herramienta de desbaste de alta energía. Riesgos: proyección de fragmentos, ruido, vibración, atrapamientos. Diseño: resguardo fijo en zonas críticas, cabina con policarbonato de impacto y enclavamiento, cortinas de luz solo en área de acceso de piezas, SS1 a parada controlada por inercia de husillo. Resultados: incidentes 0, niveles de exposición acústica reducidos a límites, auditoría aprobada y tiempos de carga mantenidos con layout que permite flujo eficiente sin comprometer distancias.
Guías paso a paso y plantillas
Evaluación de riesgos conforme a ISO 12100
- Definir usos previstos y límites (espacio, energía, tareas de operación y mantenimiento).
- Identificar peligros por tipo (mecánicos, eléctricos, térmicos, radiación, proyección, ergonomía).
- Valorar riesgo: gravedad, frecuencia/exposición, posibilidad de evitar; establecer prioridad.
Distancias de seguridad (ISO 13855) y selección de salvaguardas
- Calcular tiempo de parada: medir t_total = t_control + t_rodamiento + t_variador + margen.
- Determinar distancia: S = K × T + C (parámetros ajustados al tipo de dispositivo y acceso).
- Validar campo: comprobar cobertura, zonas ciegas y acceso por sobrepaso/puenteo.
Guión o checklist adicional
- Funciones de seguridad: STO, SS1/SS2, SLS, SLP, SSM, SOS, SDI, SBC y EDM mapeadas a riesgos.
- PL/SIL: definir requerido; seleccionar arquitectura (Cat. 3/4), MTTFd, DCavg, CCF, PFHd objetivo.
- Pruebas: fallo único, diagnóstico, detección de cortocircuito, respuesta a puerta, cortina y escáner.
Recursos internos y externos (sin enlaces)
Recursos internos
- Catálogos y plantillas: evaluación de riesgos, distancia S, matriz PL/SIL, checklist FAT/SAT.
- Estándares de marca y guiones: procedimientos de modo T1/T2, desbloqueo seguro y pruebas periódicas.
- Comunidad y bolsa de trabajo: perfiles con experiencia en PLC-S, robots y validación de seguridad.
Recursos externos de referencia
- Buenas prácticas y manuales: guías de seguridad de robots, fichas de salvaguardas y ejemplos de layouts.
- Normativas y criterios técnicos: normas de seguridad de máquinas, robótica y seguridad funcional.
- Indicadores de evaluación: checklist de auditoría, reporte de conformidad y KPIs de operación segura.
Preguntas frecuentes
¿Qué norma utilizar para iniciar el diseño de una célula robotizada segura?
Iniciar por ISO 12100 (evaluación de riesgos) para definir el PL/SIL requerido. Después, aplicar normas específicas: ISO 10218 (robots industriales) e ISO/TS 15066 (colaborativos), complementadas por ISO 13849-1 o IEC 62061 y por ISO 13855 para distancias de seguridad.
¿Es suficiente un cobot para prescindir de vallados y sensores perimetrales?
No necesariamente. Depende de la evaluación de riesgos, la herramienta, la pieza, la energía y la tarea. Puede requerirse SSM, SLS, límites de fuerza y dispositivos adicionales. La seguridad colaborativa no exonera de analizar riesgos residuales.
¿Cómo decidir entre cortinas de luz y escáner láser?
Según flujo y acceso. Cortinas protegen planos de paso con alta resolución; escáneres permiten áreas y campos mutables con SSM. La elección se basa en el riesgo, el tiempo de parada y la dinámica del proceso. Validar siempre distancias y zonas ciegas.
¿Qué diferencia hay entre PL y SIL?
Ambos reflejan integridad de seguridad: PL (ISO 13849-1) y SIL (IEC 62061). PL usa categorías, MTTFd y DCavg; SIL se basa en PFH/PFD y arquitectura. Seleccionar según el estándar adoptado por el sistema; ambos pueden coexistir con mapeo consistente.
Conclusión y llamada a la acción
Un diseño robusto de células robotizadas parte de riesgos cuantificados, requisitos PL/SIL claros y layouts que garanticen distancias y funciones de seguridad eficaces. Al integrar verificación por diseño, pruebas sistemáticas y documentación impecable, se alcanza un cumplimiento sólido sin penalizar la productividad. El siguiente paso es consolidar el expediente técnico, estandarizar pruebas periódicas y alinear KPI de seguridad con el OEE para sostener la mejora continua.
Glosario
- PL (Performance Level)
- Nivel de prestaciones de seguridad según ISO 13849-1, asociado a la probabilidad de fallo peligroso por hora y a la arquitectura del sistema.
- SIL (Safety Integrity Level)
- Nivel de integridad de seguridad según IEC 62061/IEC 61508, basado en PFH/PFD y requerimientos de arquitectura y diagnóstico.
- SSM (Speed and Separation Monitoring)
- Función que ajusta la velocidad del robot según la distancia con personas u objetos, estableciendo zonas de reacción.
- STO/SS1/SS2
- Funciones de parada segura: STO (torque off), SS1 (parada segura controlada) y SS2 (parada segura con control mantenido).









")